paper supplements & projects
This page contains some supplementary material to papers or general
projects. Some of these might be quite old. Please, refer to the
papers for more details.
(Use the full screen mode (lower right button)
for better video quality.)
- ICRA 2009 submission
-
Marc Toussaint, Nils Plath, Tobias Lang, Nikolay Jetchev: Integrated
motor control, planning, grasping and high-level reasoning in a blocks
world using probabilistic inference (submitted to ICRA 2010).
Here is the attached movie:
Get the Flash Player to see this player.
- HUMANOIDS (2008) paper
-
Michael Gienger, Marc Toussaint
, Nikolay Jetchev, Achim
Bendig, Christian Goerick: Optimization of fluent approach and
grasp motions.
8th IEEE-RAS
International Conference on Humanoid Robots (Humanoids
2008)
Here is the attached movie:
Get the Flash Player to see this player.
- HUMANOIDS (2007) paper
-
M Toussaint, M Gienger, Ch Goerick (2007):
Optimization of sequential attractor-based movement for
compact.
(preprint)
Humanoids 2007.
Here is the attached movie:
Get the Flash Player to see this player.
- Visual flow estimation & segmentation using belief propagation
-
M Toussaint, V Willert, J Eggert, E Körner
(2007): Motion Segmentation Using Inference in Dynamic Bayesian
Networks.
British Machine Vision
Conference (BMVC 2007).
best paper award: V Willert, M
Toussaint, J Eggert, E Körner: Uncertainty Optimization for
Robust Dynamic Optical Flow
Estimation.
The sixth
Int Conf on Machine Learning and Applications (ICMLA 2007), pages
450-457.
- Probabilistic inference planning
-
Here are some movies: (red=forward messages, green=bwd messages, blue=posterior state visiting probability for random starts/goals)
Get the Flash Player to see this player.
Get the Flash Player to see this player.
Please refer to:
M Toussaint, S Harmeling, A Storkey (2006): Probabilistic
inference for solving
(PO)MDPs.
Research Report
EDI-INF-RR-0934, University of Edinburgh, School of Informatics.
M Toussaint and A Storkey (2006): Probabilistic inference for
solving discrete and continuous state Markov Decision
Processes.
23nd International
Conference on Machine Learning (ICML 2006)
M Toussaint, Ch Goerick (2007): Probabilistic
inference for structured planning in
robotics.
Int Conf on Intelligent Robots
and Systems (IROS 2007).
- Inference and planning on factor
graphs
- See here for a
currently ongoing project on implementing generic inference techniques
(based on message passing) on factor graphs and using this for solving
(PO)MPDs.
- Motor control and physical simulation
- We (mainly myself and Heiko from Edinburgh) are currently working
on nice physical simulation environments. We use the Open Dynamic Engine as the physical
simulation engine, but designed an additional generic data structure
describing the dynamical state of the system for more sophisticated
computations (inverse kinematics, etc). Here are some preliminary
results: A movie demonstrating inverse kinematics for an
arm (simply using the pseudo inverse) and a physically simulated 1-legged hopper (Windows codec) that is quite stable
and flexible (not a simple superposition of oscillation and
stabalization). Source code will be published some time in the future.
- Bayesian Search & Gaussian Process
priors
-
See the project page on Bayesian Search and
Gaussian Process priors, which is mainly addressed to the optimization
and EC community.
- (2005) Learning discontinuities in inverse dynamics
-
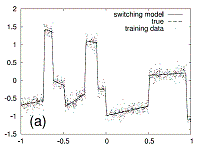
Please see here as a supplement to
M. Toussaint and S. Vijayakumar (2005): Learning discontinuities for
switching between local models. 19th International Joint
Conference on Artificial Intelligence (IJCAI 2005), 1744-1745.
- (2004) Sensorimotor maps
-
Please see here as a supplement to the publication
M. Toussaint (2006): A sensorimotor map: Modulating lateral interactions for
anticipation and planning. Neural Computation 18, 1132-1155.
For earlier work on this, see here that refers to
M. Toussaint (2004): Learning a world model and planning with a
self-organizing dynamic neural system. In Advances in Neural
Information Processing Systems 16 (NIPS 2003), 929-936, MIT Press,
Cambridge.
- (2003) Lerning genetic representations
-
Please see here for a project on
evolving genetic representations:
M. Toussaint (2003): Demonstrating the Evolution of Complex Genetic
Representations: An Evolution of Artificial Plants. Genetic
and Evolutionary Computation Conference (GECCO 2003), 86-97.
Recent Posts
Die gängigen Erklärungen zu “Was ist Informatik?” – etwa von der
Gesellschaft für Infomatik,
der
TU Dresden,
oder auf Wikipedia –
machen es einem schwer, sic...